케이슨식 방파제 대상 실시간 모니터링 데이터 분석을 위한 온라인 학습 기반 적응적 이상상태 탐지 알고리즘 개발
Development of Online-learning based Adaptive Anomaly Detection Algorithm for Monitoring Data Analysis on Caisson Type Breakwater
Article information
Trans Abstract
Most port structures are massive and data measured on them sensitively changes to the surrounding environment including sea waves, tides, wind, and other operational conditions so it might be difficult to extract and long-term monitor their own features such as natural frequencies and mode shapes. To solve this problem, an anomaly detection algorithm with online learning was developed for the analysis of monitoring data on the port structures. For this, data were first measured on a 1/50 scaled model of caisson type breakwater through hydraulic model experiments, and the characteristics of data were investigated. Then an unsupervised algorithm was developed to online detect abnormal conditions caused by the drift, which can track the reconstruction error from the principal component analysis and the Euclidean distance between original and reconstructed signals. The experimental results showed that the proposed algorithm could be successfully applied to time-dependent dataset shifts with high accuracy and automatically calculate the threshold based on the adaptive model.
1. 서 론
주요 항만시설은 선박이 접안하여 화물을 상⋅하역하거나 사람을 승⋅하선하기 위한 계류시설과 파랑으로부터 항만을 보호하거나 외해로부터 유입되는 모래 등에 의한 항내 매몰을 방지하거나 항내 투기장이나 매립을 목적으로 하는 외곽시설로 나눌 수 있다(Min et al., 2012). 1970년대부터 집중적으로 축조되기 시작한 항만시설물은 노후화가 이미 진행되고 있으며, 2030년을 기준으로 공용연수 30년을 초과하는 시설물의 비율이 약 50%에 이를 것으로 예상된다. 한편, 태풍과 같은 극치파랑 내습도 빈번하게 발생하고 있어 노후 시설물의 안전성 및 사용성 확보를 위한 점검 및 유지관리의 필요성이 대두되고 있다(Min, 2020; Min et al., 2022b; Yu et al., 2022). 태풍이 빈번하게 내습하는 부산항에서의 주요 피해 사례를 살펴보면, 2003년 제14호 태풍 매미에 의하여 상치콘크리트 절단⋅이격, TTP 변형⋅이탈, 피복석 유실 등이 발생하였고, 2016년 제18호 태풍 차바에 의하여 상치 콘크리트 파손, 케이슨 활동, 소파블록⋅피복석⋅사석 유실 등이 발생하였다. 2020년 제9호 마이삭 태풍으로 인하여 후포항 케이슨 혼성제 방파제에서 케이슨 활동 및 근고블록 파손, 유실이 발생하였다. 미공병단은 항만 시설물을 대상으로 구조형식에 따른 시설물 피해 유형을 「Coastal Engineering Manual」에 정리한 바 있다(UASCE, 2006). 여기에서, 직립식⋅혼성식 구조물의 전역적(global) 피해는 지반 원호파괴, 과도한 침하, 전도, 수평 변위 또는 활동 피해로 구분하였으며, 국부적(lccal) 피해는 사석 기초 피해, 케이슨 등 직립제 제체 사면에 거치된 피복재의 피해, 직립제 전면 세굴, 직립제 부재의 일부 파손으로 구분하였다. 주요한 피해 시나리오는 다음과 같다: (1)항 내측으로 고파랑에 의해 발생하는 케이슨 활동 피해의 경우, 수평력이 제체하중(마찰력)을 초과하는 경우로 일반적으로 항 외측에 파봉, 항 내측에 파곡이 생기는 조건에 해당한다. (2) 이때 수평력에 의한 연직하중을 기초지반 혹은 혼성제의 제체사석이 견디지 못할 경우 케이슨의 전도 및 침하가 함께 발생한다. (3) 기초부에 세굴이 발생한 이후 강한 파곡을 가지는 파랑 내습 시 항 외측으로 케이슨 활동 및 침하가 발생한다. (4) 파랑에 의한 케이슨의 작은 락킹 활동으로 인해 제체사석 내의 세립 골재 흡출이 발생하고, 락킹 활동이 반복됨에 따라 제체 사석 피해 및 케이슨 활동이 발생한다. (5) 외부 선박의 충격, 콘크리트 벽체의 노후화, 강한 파력으로 인한 케이슨 벽체의 파손, 속채움재 이탈 시 중량 감소로 인하여 케이슨의 활동 및 전도가 발생한다.
항만시설은 특성 상 구조물 상부를 제외하고는 대부분 해수 중에 잠겨 있기 때문에 점검 시에 수상부에서 직접적으로 접근하기 어렵다. 따라서 수중부의 경우, 수 년 주기로 정밀안전점검⋅진단 시 잠수부가 기초부, 본체를 포함한 수중육안검사를 수행하고 있으며, 그 결과를 종합적으로 판단하여 안전성 및 사용성 등을 평가한다(Lee et al., 2012; Min, 2020). 국토교통부 「시설물의 안전 및 유지관리에 관한 세부지침」에서는 앞서 전역적인 피해와 밀접한 관련이 있는 시설물의 침하, 경사/전도, 활동을 ‘중요결함’으로 분류하고 있으며, 기준값을 초과한 경우 시설물의 안전성을 위협하는 중대한 결함으로 관리한다. 현재로서는 이와 관련하여 정밀안전점검⋅진단 시에 인력에 의한 조사 및 점검만 수행하고 있으며, 항만시설에 센서 혹은 계측장비를 설치하여 확보한 데이터를 바탕으로 구조물의 안전성을 상시 모니터링한 사례는 거의 없다(Lee et al., 2012; Oh et al., 2022). 한편, 2022년 1월 「중대재해처벌법」의 시행과 함께 중대산업재해 발생 시 책임 문제로 인하여 항만시설 점검 및 유지 관리에 대한 운영자의 부담이 증가하였다. 따라서 항만 내 작업자 및 점검자의 안전을 최대한 확보하기 위하여 점검의 무인화⋅자동화를 위한 기술 개발의 필요성이 증가하고 있으며, 이는 결국 시설물의 거동 및 상태에 대한 시간이력 관리를 가능하게 함으로써 유지관리의 자동화로 연결된다.
시설물에 전역적 및 국부적인 피해가 발생하기 전에 예방적⋅선제적으로 점검하여 효율적⋅체계적으로 유지관리하기 위한 다양한 기술 개발이 이루어지고 있다. 최근에는 드론, 로봇, IoT 센서, AI, 디지털 트윈 등 4차 산업혁명기술들을 융합⋅활용하고자 하는 연구 개발이 중점적으로 보고되고 있다. GPU 등 컴퓨팅 하드웨어, 딥러닝 등 데이터 처리 기술 등의 급격한 발전과 함께 계측 데이터 분석기술 분야도 빠르게 성장하고 있다. Grosso et al. (2000), Grosso et al. (2007)은 광섬유센서를 활용한 SOFO 시스템을 통해 San Giorgio 부두에서 항만 시설물의 변형률 및 변위 장기 모니터링을 수행하였다. SOFO 시스템은 -10~+40도에서 최소 계측 정밀도가 2μm였으며 계측된 변형률과 변위는 온도와의 상관성이 높았으나 선박 도킹 및 크레인 위치 등의 활동과의 상관성은 낮았다. Lee et al. (2018)은 가속도계를 활용하여 항만시설물의 동적 특성을 분석하였다. 중력식 케이슨 방파제 상부에 가속도를 설치하여 고유주기를 측정하였으며 수위에 따라 고유주기와 감쇠비가 최대 3% 변화됨을 확인하였다. 한편, 모니터링 중 발생할 수 있는 센서 이상 신호를 감지하기 위한 신호처리 기술에 관한 연구도 다수 수행되었다. Chengline et al. (2011)은 분류 기반 머신러닝 알고리즘인 SVM (support vector machine)을 적용하여 4종의 센서 이상 신호(shock, bias, short circuit, shift)를 감지하였다. Lo et al. (2015)은 칼만 필터 기반 알고리즘을 통한 시계열 데이터 분석으로 비선형 거동, 평균이동, 파도 노이즈 등의 센서 이상을 감지하는 연구를 수행하였다. Smarsly and Law (2014)는 인공신경망(artificial neural network; ANN) 모델로 계측 센서의 응답을 예측하여 이를 바탕으로 이상 센서를 감지해 네트워크에서 분리하는 알고리즘을 제안하였다. Fu et al. (2019)의 연구에서도 ANN을 활용한 이상 데이터 감지 및 보정 알고리즘을 제안하였다. 제안된 알고리즘은 PSD 그래프를 검출하고 학습된 ANN 모델을 적용하여 데이터를 분석하고 보정하였다. Bao et al. (2019)은 이상 데이터 감지에 DNN (deep neural network) 모델 기반의 컴퓨터 비전 알고리즘을 제안하였다. 실 교량 데이터에 해당 알고리즘을 적용한 결과 6종의 센서 이상 신호(missing, block missing, square, outlier, trend, drift)를 87%의 정확도로 분류할 수 있음을 확인하였다. Lee et al. (2020)은 실 구조물에서 이상 데이터의 발생률이 매우 낮기 때문에 데이터의 불균형성을 처리하기 위해 MLP, ResNet, LSTM, ResNet-LSTM 등의 딥러닝 알고리즘과 One-class 분류기 기반 이상상태(abnormal condition) 탐지 알고리즘을 제안하였다.
구조물에 발생한 이상상태를 탐지하는 알고리즘 개발에 있어 양질의 학습데이터를 확보하는 것은 매우 중요하다. 상시 진동 센서는 구조물에 설치가 용이하고, 측정된 상시 진동 신호는 구조물 고유의 동특성(질량, 강성, 경계조건)에 관한 정보를 가지고 있다. 이상상태는 동특성의 변화를 유발하며, 이러한 동특성 변화를 이용하여 이상상태 발생 유⋅무를 탐지하는 것이 이상상태 탐지 원리이다. 하지만 동특성은 복잡한 외부환경에 의해서도 변화되어 외부환경(온도, 파랑 등)의 변화가 존재하는 구조물에서는 시간에 따라 유입되는 동특성의 특징이 달라질 수 있다(Peeters et al. 2001; Moser and Moaveni, 2011). 이로 인해 단순히 동특성의 변화만으로 이상탐지를 수행할 경우 오보(false alarm)가 발생할 가능성이 높기 때문에, 공용 중 발생하는 다양한 외부환경 변화로 인한 변동성을 고려하여 이상상태를 정확하게 탐지하는 것이 실무에서는 매우 중요하다(Deraemaeker et al. 2008). 그러나 실 구조물의 외부변화에 따른 동특성 변화 양상은 사전에 확인이 어려우며 장기 모니터링을 통해 파악할 수 있다(Peeters et al. 2001; Jin and Jung, 2018). 소수의 과거 데이터를 학습한 이상탐지 알고리즘이 향후 측정될 데이터에 대해서도 좋은 성능을 보일 것이라는 보장이 없다. 그동안 다양한 알고리즘을 이상상태 탐지에 도입하는 연구는 많이 수행되었으나, 양질의 학습데이터를 어떻게 확보하고 학습에 활용하는 지에 관한 연구는 상대적으로 관심이 적었다(Jin et al., 2015; Jin and Jung, 2018). 최근 새롭게 유입되는 데이터들을 연속적으로 모델 학습에 사용하는 온라인 학습방식 기반 이상상태 감지 기법에 관한 연구가 수행되었다. Jin et al. (2015)은 교량 구조물에 대한 수치실험을 통해다양한 외부 변동 패턴에 따른 손상 시나리오에서 온라인 학습 방식이 적은 수의 오보(false alarm)발생과 정확한 손상 시점을 탐지하는 것을 보였다. Jin and Jung (2018)은 실 교량 장기 계측 데이터(Z-24 교량(Peeters et al. 2001))에 온라인 학습 방식을 적용하여 이상상태 탐지 성능을 검증하였다. 항만구조물은 교량과 달리 특히 외부환경(온도, 바람, 파랑, 수압, 토압, 상부하중, 선박충격 등)의 변동이 큰 조건에 상시 노출되어 있다. 그러나 다양한 정상상태 데이터를 기 확보하여 학습하는 것은 매우 어려우며, 이를 해결할 수 있는 방법 중 하나가 온라인 학습방법을 이상상태 감지 기법에 활용하는 것이다.
본 논문에서는 온라인 학습 기반 이상상태 감지 알고리즘을 항만구조물에 도입하였으며, 이를 통해 항만구조물에서 발생하는 이상상태를 실시간으로 탐지할 수 있는 알고리즘을 개발하고자 한다. 동⋅서⋅남해안 중력식 외곽시설 중에서 30.1%를 차지하고, 수심이 깊고 파고가 높은 동해안에서는 54.0%로 적용 빈도가 높은, 대표적인 구조형식인 케이슨식 방파제를 대상으로 활동 피해 모사 데이터를 확보하기 위하여 1/50 축소모형을 제작하여 단면 수리모형실험을 수행하였다(Ministry of Oceans and Fisheries, 2020). 모형에 변위계, 경사계, 파고계 등 센서를 부착하고 입력 파랑에 따른 모형의 거동을 실시간으로 모니터링 하였으며, 활동 피해가 발생하면서 나타나는 신호의 특성(feature)을 추출한 다음, 실시간으로 이상상태를 탐지할 수 있는 온라인 학습 기반 알고리즘을 제안하였다.
2. 온라인 학습 기반 적응적 이상상태 탐지 알고리즘
본 연구에서는 주성분분석(principal component analysis, PCA)을 활용한 복원 오차(reconstruction error)를 기반으로 이상 상태를 탐지하는 알고리즘을 사용한다. PCA는 여러 변수(시계열 데이터) 간에 존재하는 상관관계를 이용하여 이를 대표하는 주성분(principal component, PC)을 추출해 차원을 축소하는 기법이다. 원본 데이터의 정보 손실을 최소화하기 위해 데이터의 분산(variance)을 최대화할 수 있는 초평면을 찾고, 이에 원본 데이터를 투영(projection)한다. PCA를 통하여, 원본 데이터의 특징 개수에 비해 매우 적은 대표적인 PC만으로 원본 데이터의 총 변동성을 대부분 설명할 수 있다.
PCA 기반 이상상태 탐지 알고리즘은 정보손실의 크기에 따라 이상상태 데이터를 발견하는 원리를 가진다. Fig. 1은 실시간 이상상태 탐지를 위한 PCA 기반 알고리즘 프로세스이다. 우선 수집 가능한 모든 종류의 정상상태 데이터를 확보한다. 이렇게 확보된 학습데이터는 공분산 행렬의 특이치 분해(singular value decomposition)를 통해 PC를 추출한다(Fig. 1(a)). 정상상태 데이터는 잠재적으로 가장 큰 변동성, 즉, 정상상태에서 표현 가능한 주된 변화요인을 가지는 주성분 축(PC1)과 이 변동성과 상관성이 없는 독립적 관계의 축(PC2)으로 표현된다. 본 연구에서는 대표되는 주성분 PC1을 선택하는 방법으로 Eigen-gap 기법(Fig. 2(a))을 사용하였으며(Davis and Kahan, 1970), 선택된 PC1으로 모든 학습데이터를 투영한다(Fig. 1(b)). 투영 시 PC2로 설명되는 변동성에 대한 정보는 손실된다. 투영된 데이터는 다시 PC1을 이용하여 원본 데이터 공간으로 복원한다(Fig. 1(c)). 복원된 데이터(

The procedure of PCA-based Anomaly detection

A sketch of (a) eigen-gap technique and (b) reconstruction error with Euclidean distance
PCA 기법을 포함한 대다수 이상상태 탐지 알고리즘은 정상상태 내 가능한 변동 조건에서 생성된 양질의 학습데이터(정상상태 데이터)를 구축하는 것이 매우 중요하다. 정상상태 내 일부 변동만을 가지는 학습데이터만을 이용할 경우 많은 오보를 발생시킬 수 있다(Fig. 3(a)). 앞서 언급하였듯이, 실제 구조물에서는 정상상태 내 모든 변동성을 표현하는 학습데이터의 구축이 매우 어려울 뿐만 아니라, 대상 구조물 및 시간에 따라 변화하는 시간종속특성을 가진다. 이러한 경우 신규로 추가되는 데이터에 대해 모델 학습을 지속적으로 수행하는 온라인 학습방식이 효과적이다(Fig. 3(b)).

Two types of abnormal detection process. (a) one shot-learning static reference framework, and (b) online-learning adaptive reference framework
온라인 학습방식은 지속적으로 계측된 데이터의 이상상태 유⋅무를 판별하고, 정상상태로 분류되면 학습 DB에 추가하면서 다양한 정상상태들을 포괄할 수 있도록 학습데이터를 확장한다. 반면, 계측된 데이터가 이상상태로 판단되면 학습데이터에 추가하지 않고 격리시킨다. 즉, 지속적인 모델 학습 방식은 초기 학습데이터에 존재하지 않았던 정상상태 데이터를 추가하고 지속적으로 정상상태에 대한 학습이 가능하게 하며, 기저 모델과 임계치가 시간에 따라 변화하는 시간 종속적인 특성을 가진다. 그 결과, 기존의 학습방식과 달리 임계치가 시간에 따라 적응적으로 산출되어 이상상태를 탐지할 수 있다. 온라인 학습방식을 통하여 학습데이터 구성에 따른 오보를 효과적으로 해결할 수 있으며 이상상태 발생 시점을 즉각적으로 탐지할 수 있다(Jin and Jung, 2018).
3. 실험 및 검증
3.1 실험 개요
이상 파랑의 재현 및 이에 대한 데이터 확보를 위하여 한국건설기술연구원에 설치된 단면수로 및 조파장치를 활용하여 단면수리실험을 수행하였다. 조파수로는 폭 1.2m, 높이 1.5m, 길이 50m의 제원을 가지고 있으며, 단면수로에는 전기서보 피스톤식 조파기가 설치되어 있다. 조파기에서는 규칙파 및 불규칙파를 생성할 수 있다(Fig. 4). 단면수로의 폭 1.2m는 폭 0.8m와 폭 0.4m로 분할되어 있으며, 실험체는 폭 0.8m의 수로에 설치하여 제반 자료를 취득하며, 폭 0.4m의 수로에서는 입사파의 설정 및 보정을 수행한다. 또한 흡수식 조파를 실시하여 구조물 및 조파기에서 재 반사를 최소화하였다. 단면수로는 전면 32m 구간을 강화유리로 처리하여 실험장면 관찰이 용이하도록 되어있으며, 수로 양쪽 끝부분에는 여러 겹의 다공성 구조로 형성된 소파장치가 설치되어 있다. Fig. 4에서 1번 파고계는 흡수식 조파, 2번과 3번 파고계는 반사계수 및 입사파 측정, 4번과 5번 파고계는 협수로에서 방파제에서의 입사파 계측에 이용되었다. 2번과 3번, 4번과 5번의 파고계 간격은 2점법(Goda and Suzuki, 1976)을 적용하여 입사파 주기 조건에 따라 적절하게 조절하였다.
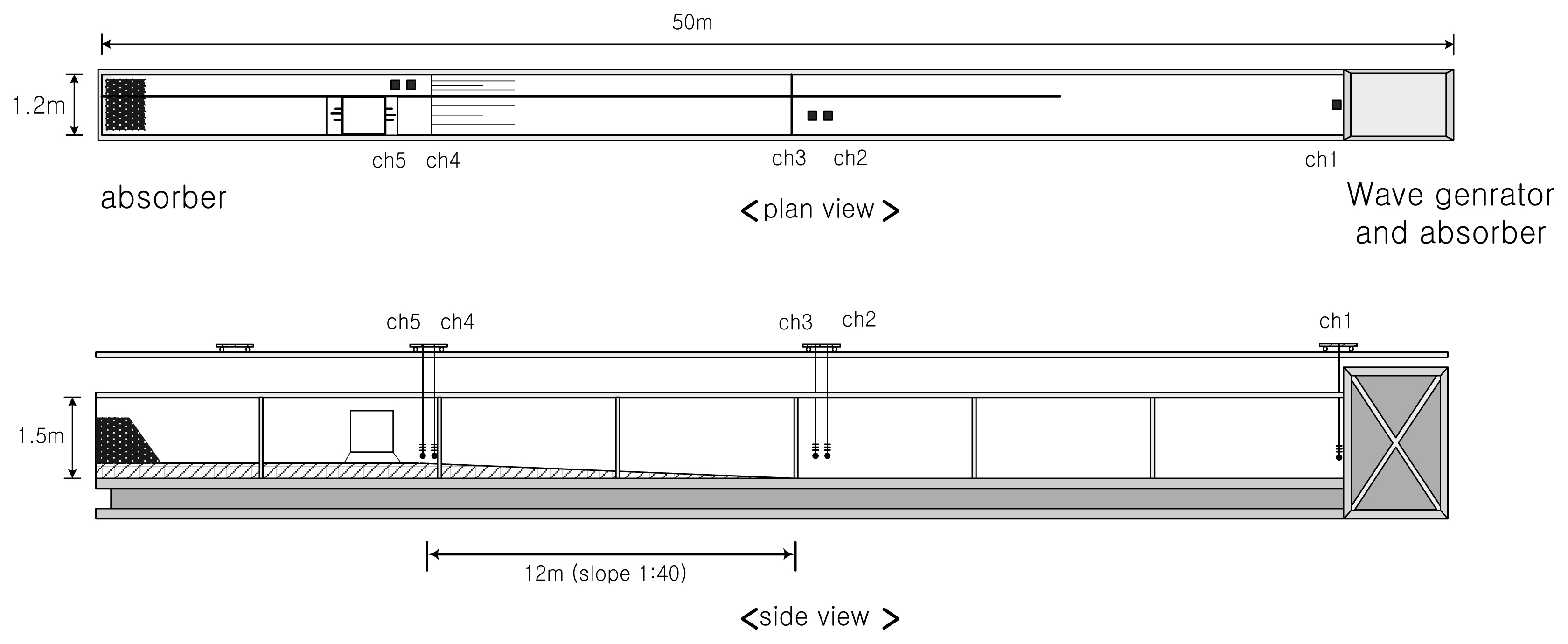
Schematic sketch of wave flume
본 논문의 실험에서 실험파는 Bretschneider-Mitsuyasu 스펙트럼을 적용한 불규칙파 조건을 적용하였다. 목표 유의주기(T1/3)는 T1/3=1.74, 1.84 s이고, 목표 유의파고(H1/3)는 H1/3= 0.13, 0.16, 0.19. 0.196m이며, 실험파 조건은 Table 1과 같다. 모형 설치 위치에서의 수심은 0.42m이다. 위 조건은 실험축척 1/50을 적용할 경우 원형 상 T1/3=12, 13s, H1/3=6.5~9.8m 조건에 해당한다. 실험모형의 설계 및 실험파의 설정은 모두 Froude 상사법칙을 적용하였다. 실험파는 구조물 설치 위치에서 구조물이 설치되지 않은 상태에서 설정하였다. 구조물 설치 후 흡수식 조파를 적용하여 구조물에서의 반사파를 수로 내에서 최소화 하였다. 본 실험에서는 실험 시 폭 0.4m 수로의 모형 토우(toe) 위치에서 입사파를 상시 분석하여 입사파로 활용하였다. 실험은 모형 상 30분을 조파하였으며, 이는 유의주기 1.84초에 대하여 978파에 해당한다. 목표 실험파에 대한 입사파 계측 결과(H1/3,meas)를 Table 1에 제시하였다. 실험파 설정 시에 최대한 계측된 스펙트럼과 유의파고가 목표치와 유사하도록 반복 실험을 수행하였다. 파고가 증가함에 따라 일부 쇄파가 발생하여 유의파고 값에 일부 차이는 있지만, 목표 입사 파고와 계측파고 값이 유사하게 계측된 것을 알 수 있다. 파고 계측을 위하여 Kenkek사의 파고계를 사용하였으며, 20Hz로 샘플링하였다.
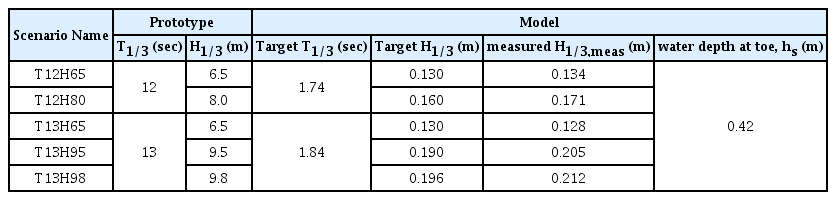
Target wave condition and measured results
실험 모형은 외곽시설의 주요 구조형식 중 하나인 직립식 케이슨 방파제이다. 본 실험의 목적은 고 파랑 내습 시 대상 구조물의 활동, 경사 등의 모니터링 데이터 확보이다. 이를 계측하기 위하여 단면수로 폭 0.8m 구간에 대하여 Fig. 5의 단면모형을 설계⋅제작하였다. 단면모형은 모형을 3개로 구분(실험구간 0.4m, 좌우측 0.2m)하여 제작하였고, 모형 간에는 2mm씩 간격을 두어 중앙의 실험 대상 목표 모형의 변위 발생이 가능하도록 하였다. 양쪽 측면의 모형(A)은 내부에 중량물을 채워 초기 설치상태를 유지하도록 하였다. Fig. 5의 모형 제작 및 수로 내 설치에 있어 실험파 조건 중 원형상 T1/3=13s 및 H1/3 =9.5cm에 해당하는 조건에 대하여 Goda 파압식을 적용한 후 이에 해당하는 모형을 설계하였다(Goda, 1974; Goda, 2010). Goda 파압식에서 정수면에서의 파압 p1과 양압력 pu는 각각 식 (1)과 식 (2)로 계산된다.

Schematic sketch of a test model (model scale)
여기서 β는 입사각, ρ는 밀도, g는 중력가속도, Hd는 통항쇄파의 영향을 받지 않는 경우 최대파고, λ1과 λ2는 수평파압에 대한 보정계수, λ3은 양압력에 대한 보정계수, α1과 α2은 충격파 및 쇄파에 대한 압력계수이다. T1/3=13s 및 H1/3= 9.5m 조건에 대한 Goda 파압과 이에 대한 안정중량은 Fig. 6과 같이 계산된다. 이를 이용하여 모형실험을 진행하였다.

Wave pressure by Goda formula and weight of vertical structure (design condition: prototype T1/3=13s, H1/3=9.5m)
Table 1의 5종 파랑 시나리오에 대하여 모형의 거동을 계측하기 위하여 모형 상부 양 끝에 와이어 변위계(Tokyo SOKKI DP-G)를 설치하였으며, IP 67 방수방진시험 인증을 받은 케이스로 만든 함체 내부에 가속도계(PCB 353B12)와 경사계(Murata Electronics SCA100T)를 부착한 다음 모형 후면에 부착하였다. 가속도계는 X축(파랑) 방향, Z축(중력) 방향의 진동을 계측하며, 경사계는 Y축(Tilt-X)과 Z축(Tilt-Y)을 중심으로 하는 회전량을 계측한다. 가속도계, 경사계, 변위계는 모두 동일한 DAQ에 연결되어 100 Hz 샘플링으로 계측되며, 계측 데이터는 PC에 저장된다. Fig. 7은 실험을 위한 모형 및 계측 센서의 위치를 보여준다. 그림에서 보듯이 센서는 계측 시 발생 가능한 고장 등을 사전에 방지하고자 모형 양 끝에 2개소씩 설치하였으며, 고파랑 발생 시 월파가 센서 함체 및 케이블에 미치는 영향을 최소화하기 위한 마감 작업도 함께 수행하였다. 전체 계측 시스템은 방수 실리콘 작업을 통하여 내부로 물이 침투하는 것을 방지하였다.
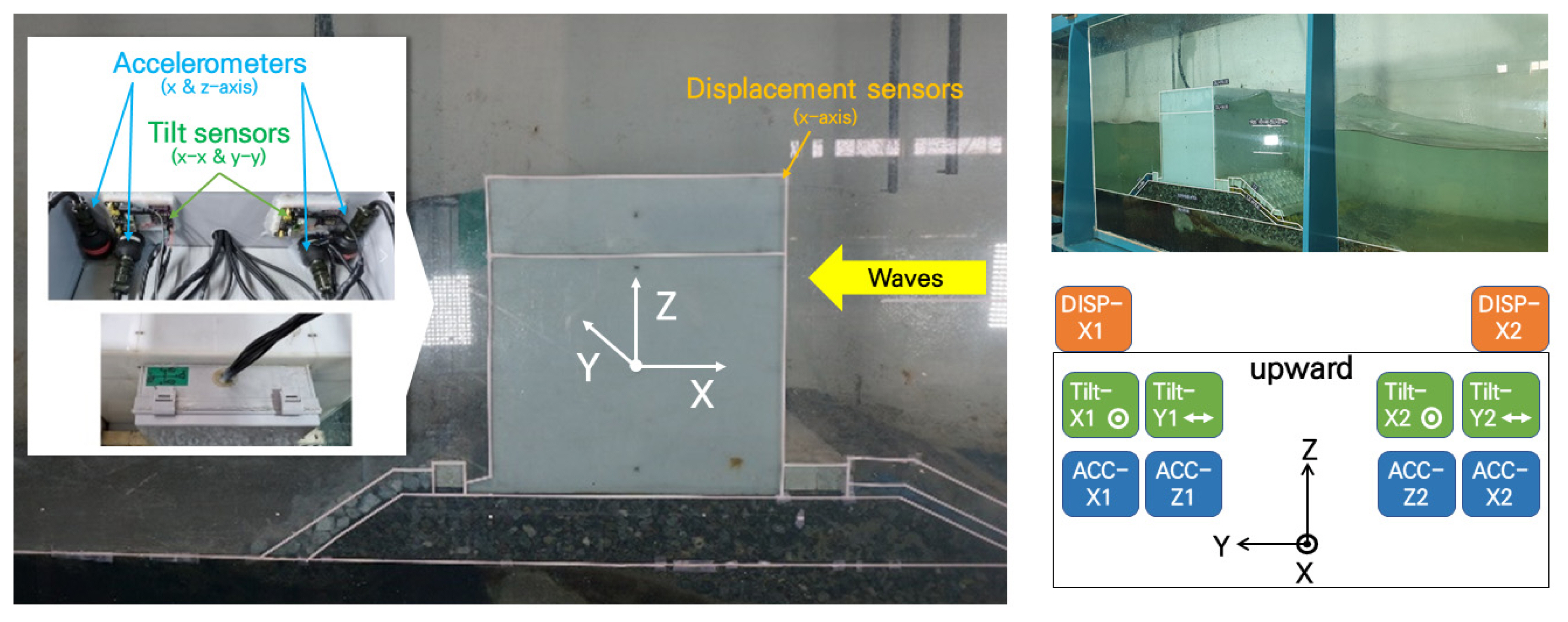
A setup for hydraulic model experiments
3.2 계측 데이터
각 시나리오별로 가속도, 경사, 변위, 파고 데이터를 30분간 계측하였다. 계측된 데이터를 Fig. 8에 나타내었다. 100 Hz 샘플링으로 계측된 가속도, 경사, 변위 데이터의 수는 총 9,000,000개, 파고 데이터는 180,000개였다. 여기에서, 파랑에너지가 증가함에 따라 모형 우측에 설치된 Tilt-X2과 Y2는 실험 중 이상신호가 발생하여 좌측에 설치된 Tilt-X1과 Y1만을 데이터 분석에 사용하였다. Fig. 8(e)와 같이 파고 및 파 주기가 작은 시나리오 T12H65와 T12H80에서는 전체 데이터에 큰 변화가 없었다. T13H65부터 진동 및 경사 신호의 진폭이 증가하기 시작하였으며, 1mm 이하의 활동이 발생하였다. H13H95와 H13H98에서는 진동 및 경사 데이터의 최대 진폭이 약 2배 증가하였으며, 최대 3.8mm의 밀림이 발생하였다. Fig. 8(d)의 Z축 중심 회전 변위와 Fig. 8(e)의 모형 좌⋅우측 변위 데이터의 차이로부터, 파 에너지가 증가하면서 (-)X축 방향으로 활동 변위가 발생함에 따라 Z축을 중심으로 하는 영구 회전 변위(Tilt-Y)가 약 0.16도 발생하였음을 확인할 수 있다. Figs. 8(a), 8(b)의 진동 데이터 및 Figs. 8(c), 8(d)의 경사 데이터는 파랑에 의한 진동 및 월파에 의한 충격(impact)으로 인해 계측된 시간 영역 데이터만으로는 이상상태를 추출하기 어렵다. 반면 Fig. 8(e)의 변위 데이터는 파랑 등에 의해 일부 잡음이 포함되긴 하지만 구조물의 이동량을 시간 영역에서 직접 확인할 수 있다.
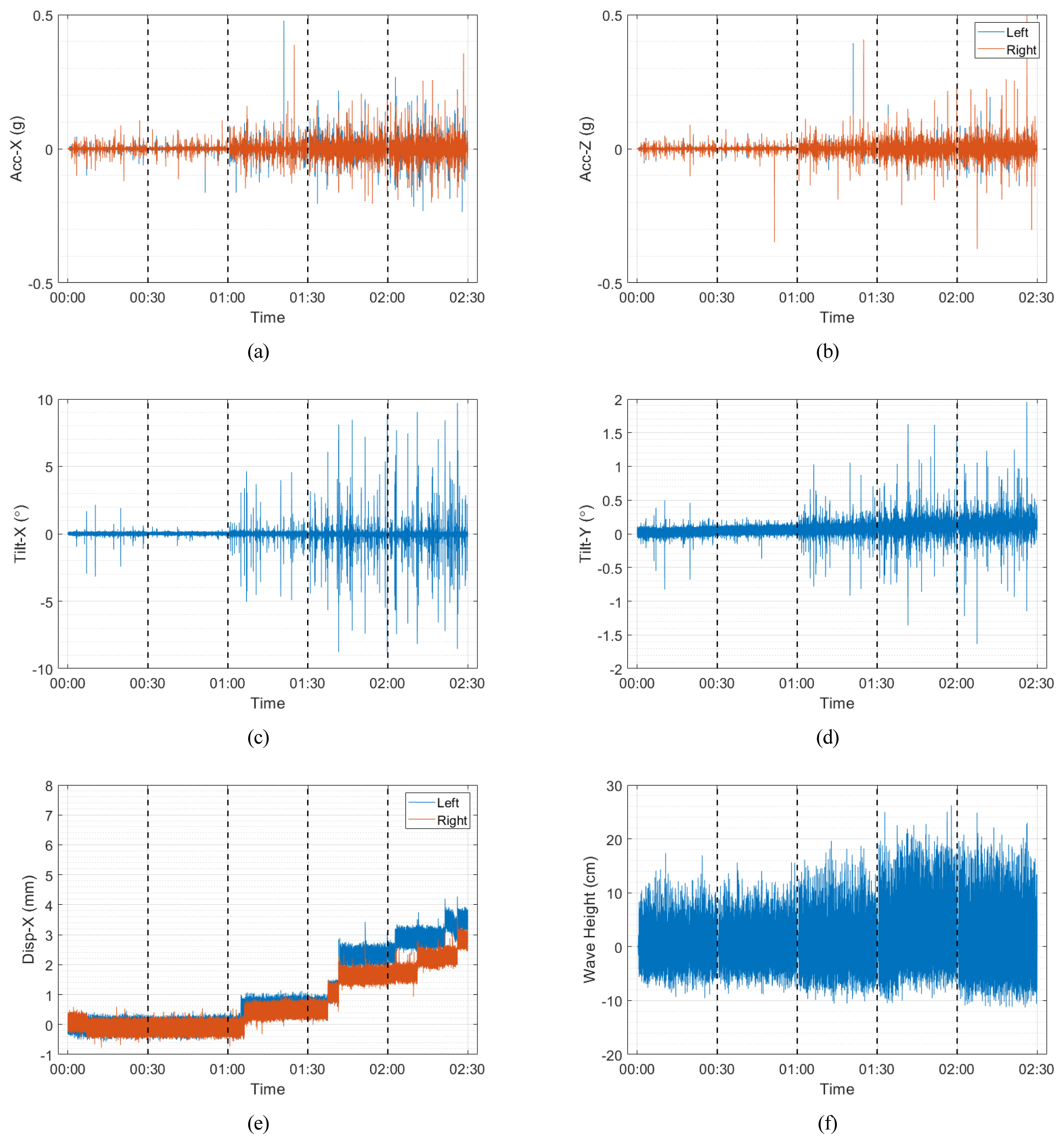
Measured signals. (a) acceleration at x-axis, (b) acceleration at z-axis, (c) rotation on y-axis, (d) rotation on z-axis, (e) displacement, and (f) wave height
케이슨식 방파제 구조물은 지진, 선박 및 태풍 등으로 순간적으로 활동 변위가 발생할 수 있다. 이러한 활동 변위 발생, 즉 이상상태 발생을 실시간으로 탐지할 수 있는 가장 간단한 방법은 변위계를 통해 계측하는 것이다. 그러나 변위계 설치 조건, 높은 잡음 및 신호의 이동(drift)으로 인한 낮은 계측 안정성 등으로 실무 활용에 어려움이 존재한다(Lee et al., 2014). 반면, 가속계와 경사계 등 동적 신호는 상대적으로 대상 구조물에 설치가 용이하지만 변위계와 달리 신호에서 직관적으로 이상상태를 파악하는 것이 어렵다. 동특성은 구조물의 고유 질량, 강성 및 경계조건 등에 따라 변화하는 구조물 고유의 특성으로, 활동 변위로 인한 이상상태가 케이슨의 경계 조건 변화를 유발하고 이는 구조물의 동특성 변화로 나타난다. 동특성 모니터링이 실제 실무에서 활용성이 높다는 측면에서 동적 응답 기반 모니터링 기술이 활발히 연구되고 있다.
가속도 및 경사 데이터로부터 이상상태를 실시간으로 판정할 수 있는 고유 특징(feature)을 추출하여 모니터링 하기에 앞서, 가속도 및 경사 데이터를 대상으로 주파수 영역에서의 파워스펙트럼(power spectral density; PSD)을 이상상태 단계별로 비교하였다. 여기에서, 이상상태는 변위계로부터 계측된 활동 변위로부터 판단하였다(Fig. 9). 모형 양 측 2개의 변위계로부터 계측한 활동 변위로 정상상태 포함 총 9종의 이상상태 단계(stage)로 구분하였다. 이상상태 탐지 알고리즘의 정확도는 이 단계를 기준으로 평가하였다.

Abnormal condition from measured drift signals (ground truth)
각 시나리오에서 10분간 계측된 데이터로부터 계산된 파워스펙트럼의 예시를 Fig. 10에 도시하였다. Fig. 10(a)는 가속도 신호로부터 계산된 파워스펙트럼이며, Fig. 10(b)는 경사 신호로부터 계산된 파워스펙트럼이다. 다수 구조물에서 가속도 신호를 사용하여 동적 해석을 수행하지만, 항만시설의 경우 축 방향의 진동보다 기울음 신호를 통한 동적 분석이 피크(peak) 주파수 등을 확인하는 데에 더 효과적이며, Min et al. (2022a)에서 보고된 계류시설 널말뚝식 안벽에서의 실 계측 데이터에서도 마찬가지였다. 경사 신호로부터 계산된 파워스펙트럼을 살펴보면, 파랑 에너지가 증가하고 활동이 발생함에 따라 파워스펙트럼의 형상이 변화하였다. 이는 가속도 신호에서도 마찬가지로 나타났으나, 경사 신호에서 보다 명확하였다. 따라서 본 논문에서는 경사 신호의 파워스펙트럼을 데이터의 특징으로 사용하여 모니터링 하도록 하였다. 파워스펙트럼 상 나타나는 피크 주파수는 파랑 에너지가 증가함에 따라 오히려 관찰이 어려움을 알 수 있는데 이와 관련해서는 추가적인 연구가 필요할 것으로 판단된다.

Samples of power spectral density depending on the abnormal condition (a) calculated with acceleration and (b) calculated with tilt angle
3.3 분석 결과
본 논문에서는 수리모형실험으로 확보한 활동 단계별 경사 신호로부터 이상상태를 실시간으로 탐지할 수 있는 이상상태 탐지 알고리즘을 개발하였다. 이상상태 탐지를 위한 경사 신호의 특징으로 파워스펙트럼 형상을 사용하였다. 파워스펙트럼은 10분간 계측한 데이터로부터 생성되었으며, 데이터가 한 포인트씩 추가될 때마다 해당 포인트를 포함한 10분간 계측 데이터로부터 파워스펙트럼이 생성된다.
이상상태 탐지에 있어 학습데이터의 구성에 따른 탐지 성능을 비교하기 위하여 Table 2와 같이 총 3가지의 초기 학습데이터 개수 별 알고리즘을 적용하여 비교하였다. Case 1은 정상상태 데이터의 20%, Case 2는 정상상태 데이터의 50%, Case 3은 정상상태 데이터의 80%를 초기 학습데이터로 사용한 것이다. 전체 데이터의 수는 1,681개로, 10분간 계측된 경사데이터로부터 생성된 PSD 개수이다. 데이터 분석용 PC 성능의 한계로, 전체 계측 데이터로부터 생성된 PSD의 일부만 사용하였다. 학습데이터의 구축 방법에 따른 학습방법은 앞서 언급한 2가지에 대하여 모두 검토하였으며, Fig. 3(a)의 One shot-learning (Static Reference Framework)과 Fig. 3(b)의 Online-Learning (Adaptive Reference Framework)이다.
Case studies depending on the number of initial training samples
일반적으로 사용되는 One shot-learning 알고리즘과 본 논문에서 제안하는 적응적 Online-Learning 알고리즘을 통해 Table 2의 초기 학습 데이터를 사용하여 학습을 수행하였으며, 그 결과를 Fig. 11에 비교하여 나타내었다. Fig. 11의 좌측은 One shot-learning 알고리즘을 적용한 결과이며, 우측은 Online-Learning 알고리즘을 적용한 결과이다. 그림의 x축은 계측 시간별 확보한 PSD 특징의 시간 인덱스(#time index)이고, 세로축은 PCA를 통해 복원된 데이터와 원본 데이터간의 유클라디안 거리로부터 계산된 이상상태 지수인 Q-statistics이다. 그림에서의 빨간색 세로 점선은 Fig. 9의 이상상태 단계가 변경되는 시점이며, 파란색 점은 초기 훈련데이터, 검정색 점은 정상상태로 판정된 데이터, 빨간색 점은 이상상태로 판정된 데이터이다.
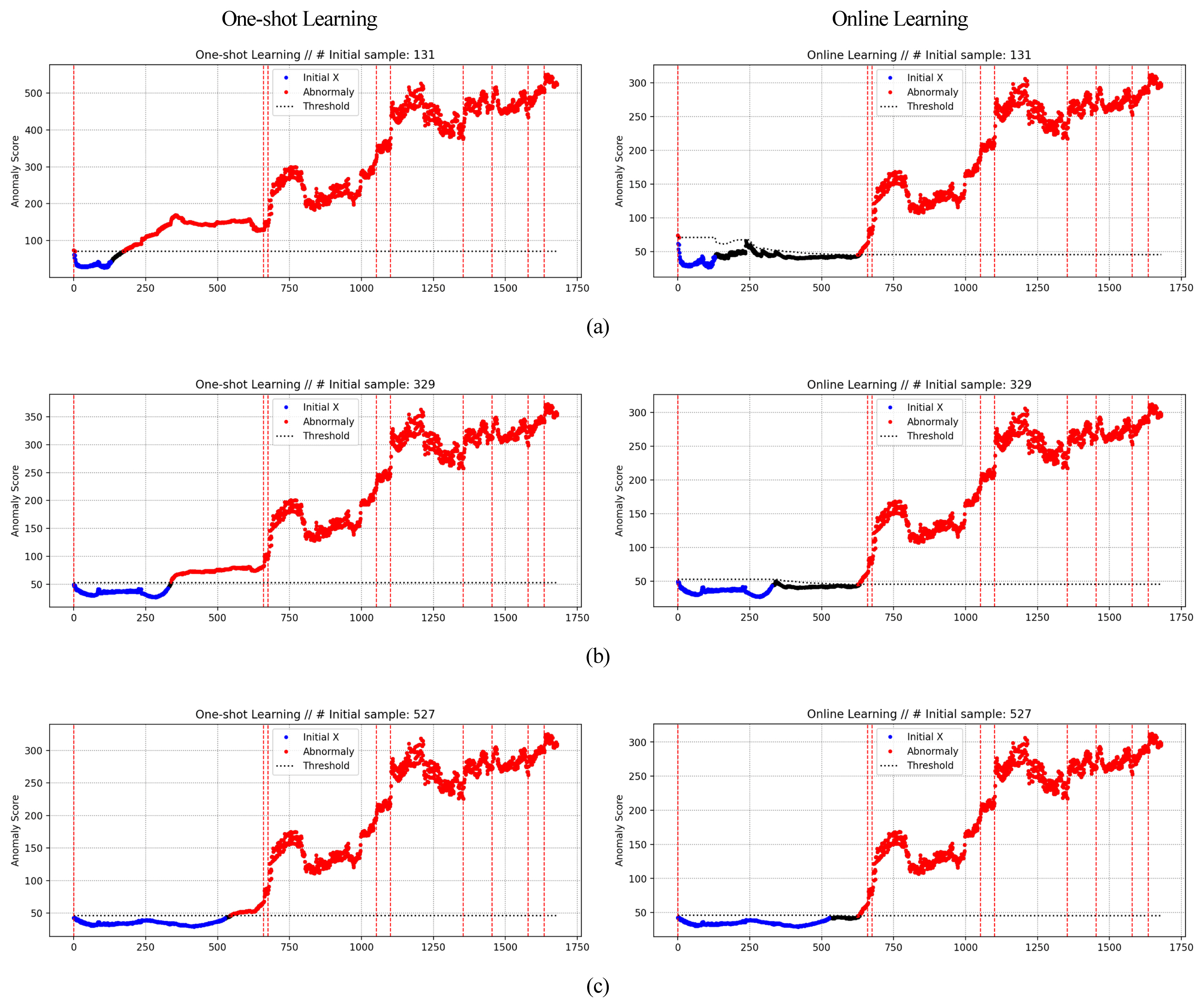
Results of abnormal condition detection (a) with 131 initial samples (Case 1), (b) with 329 initial samples (Case 2), (c) with 527 initial samples (Case 3)
One-shot learning 방법은 초기 학습데이터에 따라 기저 모델이 학습되면서 고정된 임계치를 제공하며, 이를 토대로 새로 계측되어 입력된 데이터에 대한 이상상태 유무를 판단한다. 초기치 훈련데이터가 적은 Case 1과 Case 2에서 정상구간(시간 인덱스 150~620)에서 오보가 발생하였으며, 시간 인덱스가 증가함에 따라 이상치 점수가 지속적으로 증가하였다. Case 3에서는 다수의 초기 훈련데이터 확보로 인하여 정상상태에서의 오보 빈도가 감소하였다. 즉, One-shot learning 방법을 통한 학습의 경우 초기 훈련데이터로 충분한 변동성을 포함하여 기저모델을 구성하여 임계치를 결정하여야 이상상태 탐지가 가능하다. 그러나 실 구조물에서 발생 가능한 변동성을 충분히 고려한 초기 훈련데이터를 확보하기 쉽지 않은 점을 고려하면, One-shot learning 알고리즘은 현장 적용성이 낮다. 한편, Online learning 방법은 초기 학습데이터가 추가⋅확장됨에 따라 기저모델이 재구성되며, 그에 따른 임계치가 함께 적응적으로 변화하였다. 그 결과 초기 학습데이터의 구축에 상관없이 오보가 발생하는 것이 급격하게 줄었으며, 실제 활동변위가 발생하는 최초 시점을 정확하게 포착함을 확인하였다. 또한 이상상태 단계가 증가함에 따라 One-shot learning과 마찬가지로 이상치 점수가 지속적으로 증가하였다. 여기에서, 첫 번째 이상상태가 발생한 시점(ground truth) 직전에 Online learning 알고리즘에서 이상상태로 탐지된 빨간색 점은 PSD 생성을 위한 10분간 계측 데이터에 첫 번째 이상상태 데이터가 포함되면서 탐지된 것이다. 따라서 본 논문에서 개발한 Online learning 방법은 One-shot learning 방법과 비교하여 이상상태를 매우 정확하게 탐지함을 알 수 있다.
이상상태 탐지 알고리즘에 있어서 이상상태 발생의 최초 시점을 적시에 정확하게 탐지하는 것이 매우 중요하다. 항만구조물의 규모, 설치 센서의 개수, 계측 데이터의 수가 증가할수록 이는 매우 도전적이며, 인력만으로 판단하기 어렵다. 특히 항만구조물의 경우 지속적으로 작용하는 파랑과 온도하중, 선박하중, 크레인 및 컨테이너 등과 같은 중량물 등이 계측 신호에 영향을 미치기 때문에 고정 임계치를 통한 이상상태 발생 관리에 한계가 있다. 따라서 본 논문에서 제안한 Online 적응적 기법을 통해 항만시설 운영 상황에 맞는 임계치 설정 알고리즘을 통해 이상상태 판정 오보 발생량을 줄이는 것이 중요하다. 추후 실제 구조물에서 계측된 데이터를 학습에 사용하여 정상상태에서의 오보 판정률을 확인하고자 한다.
4. 결 론
본 논문에서는 온라인 학습 기반 이상상태 감지 알고리즘을 항만구조물에 도입하였으며, 이를 통해 항만구조물에서 발생하는 이상상태를 실시간으로 탐지할 수 있는 알고리즘을 개발하였다. 동⋅서⋅남해안 중력식 외곽시설 중에서 30.1%를 차지하는 대표적인 구조형식인 케이슨식 방파제를 대상으로 1/50 축소모형을 제작하였으며, 단면수리실험을 통해 고파랑 내습 시 대상 구조물의 활동, 경사 등의 모니터링 데이터를 확보하였다. 변위 데이터는 이상상태 판정을 위한 참값으로 활용하였으며, 동적 데이터인 경사 데이터를 분석을 위한 입력 데이터로 사용하였다. 우선 대표적인 동적 신호에 해당하는 경사와 가속도 신호를 주파수 영역에서 비교하였으며, 항만시설에서는 가속도 신호가 동적 신호 분석에 더 적합함을 확인하였다. 10분간 계측한 경사 신호로부터 파워스펙트럼을 계산하여 이상상태 단계별로 비교하였으며, 이상상태 단계별로 파워스펙트럼 형상이 변화함을 확인하였다. 즉, 파워스펙트럼의 형상을 신호의 특징으로 학습 및 검증데이터를 구성하였다. 초기 학습데이터를 정상상태의 20%, 50%, 80%만큼 사용하여 One-shot learning 알고리즘과 본 논문에서 제안하는 Online learning 알고리즘으로부터 임계치를 설정하고 이로부터 이상상태 판정 정확도를 비교하였다. 그 결과 제안 알고리즘이 초기 훈련데이터의 수에 상관없이 적응적으로 임계치를 업데이트하면서 정확하게 이상상태 발생 시점을 판정함을 확인하였다. 실제 항만구조물에서는 파랑, 조위, 온도, 선박, 크레인, 각종 중량물 등이 계측 신호에 영향을 미치기 때문에 장기 계측을 통하여 충분한 학습데이터를 확보하여야 고정 임계치에 의한 이상상태 판정이 가능하다. 본 논문에서 제안한 Online learning 기반 적응적 학습을 통해 임계치를 실시간으로 업데이트하면서 이상상태를 관리할 경우, 기존 기법 대비 초기 학습데이터의 양을 줄일 수 있으며 그럼에도 이상상태 판정 오보 역시 상당량 줄일 수 있을 것으로 판단된다. 후속 연구를 통하여 실제 구조물에서 장기간 측정된 데이터를 바탕으로 개발 알고리즘을 검증할 계획이다. 이를 통하여 항만구조물에서의 모니터링 데이터를 실시간으로 분석하여 정확하게 안정성 및 사용성을 판단하고 관리할 수 있을 것으로 기대된다.
감사의 글
본 논문은 2021년 해양수산부 재원으로 해양수산과학기술진흥원(과제번호: 20210659)의 지원을 받아 수행되었으며, 이에 감사드립니다.