


1. 서 론
연안 페리 서비스는 도서지방의 여객 및 화물운송을 위해 필수적이다. 하지만 전세계적으로 연안 페리선박의 크고 작은 안전사고는 지속적으로 발생하고 있다. 특히 2014년 4월, 인천항에서 제주항으로 항해하는 연안 페리선박이 여러 가지 사유로 인한 복원성 결여 및 화물 고박 등의 문제로 인해 침몰하는 사고가 발생하였다(SIC, 2022). 또한 2009년 4월, 일본 연안에서는 악천후로 인한 과도한 연안 페리 선박의 횡동요가 발생하여 수십대의 트레일러의 고박이 파손되는 등의 선체 및 화물손상 사고가 발생하였다(MLIT, 2011).
이러한 사고를 예방하기 위해서, 연안여객선에서 화물에 대한 고박 안전성은 사고 예방을 위해 반드시 확보되어야 한다. 여기서의 고박 안전성은 페리선박이 악천후에 조우했을 때, 선박내부에 위치한 화물의 이동을 최소화하여 안전하게 화물을 목적지까지 운송할 수 있음을 의미한다. 항해 중 화물이 과도한 이동이 발생할 경우에는 페리 선박은 복원성을 잃게 되어 침몰 등과 같은 대형사고로 이어질 수 있기 때문에 주의해야 한다. 트레일러와 같은 중량화물은 자동차와 같은 일반화물에 비해 더 크고 무겁기 때문에 화물 고박에 유의해야 한다. 특히, MLIT (2011) 에 따르면, 연안 페리 선박의 운항에서는 악천후시 컨테이너 및 트레일러와 같은 종류의 중량 화물의 고박 안전성을 확보하는 것이 중요하다. 현재 화물 고박 안전성은 IMO CSS (IMO, 2011)을 기준으로 하여 고박력과 화물의 적재 위치에 따른 가속도를 기반으로 산출하고 있다. 하지만 이러한 기준은 화물의 종류, 무게, 고박 방식 등의 차이를 고려하지 않고 동일한 기준을 제시하고 있다.
국내외 많은 연구자들이 연안 페리선박의 사고 원인에 대한 분석 및 선박 동요에 따른 화물 고박 안전성 등에 대한 연구를 진행해오고 있다. Chung et al. (2020)은 로로 여객선의 침몰 사고를 유체-구조 연성(Fluid-Structure Interaction, FSI) 해석기법을 이용하여 사고 원인을 조사하였으며, 선박의 자세에 따른 화물 이동과 해수 유입량을 계산하여 사고 상황을 재현하였다. Choung et al. (2016)은 연안 카페리 차량 고박 장치 안전성에 대한 검토를 위해 다양한 가속도 추정 방법에 따라 고박 장치에 작용하는 외력을 비교 평가하였다. Yu and Lee (2020)은 국내 연안 카페리선박의 선체가속도를 측정하여 화물 고박의 기준값과 비교 평가하였다. Yu (2021)은 파고 데이터를 토대로 하여 유의파고에 따른 선체가속도의 변화를 추정하여 고박 안전성을 평가하였다. Kang et al. (2020)은 평수구역을 운항하는 여객선의 고박 타당성을 분석하기 위해, 선체운동을 측정하고 시뮬레이션 결과와 비교 평가하였다. Sasa et al. (2023)은 연안 페리선박의 트레일러 모션을 트레일러 위치, 고박 방법, 트레일러 내부의 무게중심의 변화에 따라 비교 평가하였다. Kabaciński, J. and Wisnicki, B. (2009)는 비규격화된(non-standard) 화물 고박 안전성에 대한 평가를 위해 IMO CSS code를 적용하여 계산하고 그 정확도를 분석하였다. Poulios et al. (2009)은 페리선박에 적재한 트레일러의 동적 시뮬레이션 모델을 통해, 트레일러의 고박 안전성을 평가하였다.
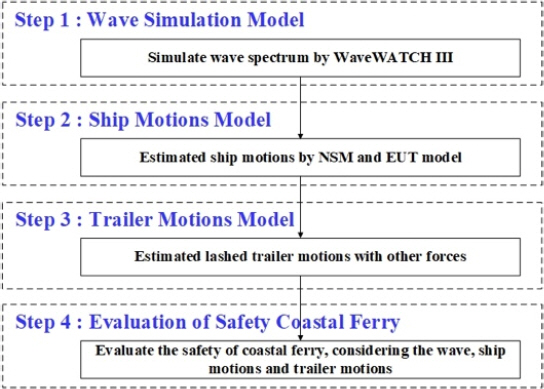
본 연구에서는 실제 한국과 일본에서 발생한 페리선박의 사고를 시뮬레이션을 통해 재현하여 사고 당시의 기상상태, 선박 운동, 그리고 적재된 트레일러의 운동을 분석하고자 하였다. 또한 그 결과를 분석하여 추후 연안 페리선박의 운영 기준을 제시하여 연안 페리선박의 안전사고를 방지하고자 하였다. 본 연구의 연구흐름은 Fig. 1과 같다. 우선 파도 시뮬레이션 모델을 이용하여 사고당시의 해상 상태를 재현하였다. 선박 운동 모델을 이용하여, 선박 종동요(Pitching), 횡동요(Rolling)을 추정하였으며, 이러한 선박 운동으로부터 발생하는 트레일러의 가속도를 예측하여, IMO CSS 기준값과 비교하여 사고시점을 예측하였다. 이러한 결과를 이용하여, 연안 페리선박의 사고 예방을 위한 기상상태, 선박 운동, 트레일러 가속도에 대한 기준을 각각 제시하여 사전 예보시스템을 구축하고자 하였다.
2. 연안 페리선박 사고의 개요
본 연구에서는 2009년 04월 일본 연안에서 발생한 사고 (Case J)와 2014년 04월 한국 연안에서 발생한 사고(Case K)를 분석하였다. 각각의 사고는 연안 페리선박이 항해 중에 화물 고박 파손 등으로 인해 발생하였다. Fig. 2와 Table 1은 각 사고 발생 당시의 일시, 위치 및 기상상태를 나타낸다. 두가지 사고 케이스는 사고 원인이 다르며, 많은 연구에서 다양한 사고원인을 제시하고 있지만, 본 연구에서는 화물 고박의 관점에 초점을 맞추어 연구를 진행하였다.
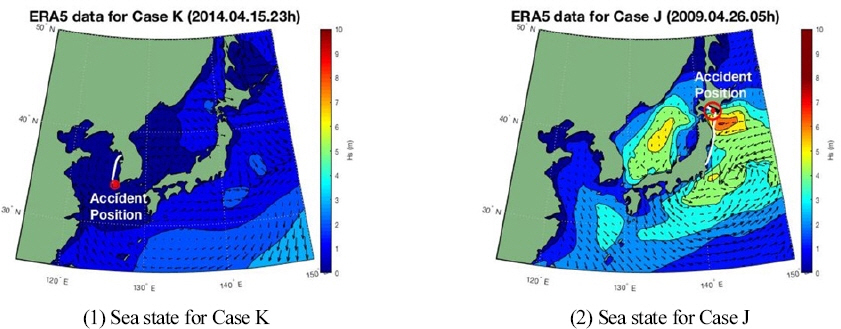
Table 1
Details of accidents for case study
| Date and time | Navigation area | Wave height | Wind speed | |
|---|---|---|---|---|
| Case K | 2014.04.15 23:50 | From Incheon to Jeju in Korea | 0.5m | 4 m/s |
| Case J | 2009.04.26 09:00 | From Oarai to Tomakomai in Japan | 9.0m | 28 m/s |
Fig. 2와 Table 1에서 Case K는 사고 당시, 기상상태가 양호한 것으로 보여진다. 하지만 Case J는 강한 바람과 파도의 영향을 받아 선박이 악천후에 조우했을 것을 예상할 수 있다. 해당 사고의 페리선박 제원은 Table 2와 같으며, 본 연구에서 적용한 트레일러는 일반적인 트레일러의 제원을 Table 3과 같이 적용하였다.
3. 파도 시뮬레이션 모델
본 연구에서는 전지구역 파도 시뮬레이션 모델인 WaveWATCH III (WW3; version 4.18; Tolman, 2014)모델을 이용하여 사고당시 해역의 기상상태를 확인하고자 하였다. Waskito et al (2022) 과 Lee et al. (2022)는 WW3 모델을 이용하여 파도상태를 재연하였고, 재연된 파도 상태와 선박 모델을 통해, 측정된 선박 운동 데이터와 비교 평가하였다. 본 연구에서는 NCEP-FNL (National Centers for Environmental Prediction- Final)의 바람데이터를 입력 값으로 하여 실제 해역과 근접하게 파도상태를 추정하고자 하였다. WW3모델은 여러가지 물리적 프로세스를 매개변수화 함으로써 파랑 스펙트럼 방정식을 다음의 식 (1)-(3)과 같이 계산할 수 있다.
여기서, N은 파수 스펙트럼, k는 파수벡터, cg는 군파 속도, V는 해양파 속도, s는 파향 θ에서의 좌표, m은 s와 평행한 좌표, S는 스펙트럼의 순 소스 항, ς는 고유 라디안 주파수, 그리고 d는 평균 수심이다. 소스항 S는 선형 입력값(Linear input) Sln, 바람 입력값(Wind input) Sin, 비선형 파동간 상호작용(Nonlinear wave-wave interaction) Snl, 파동 소산(Wave dissipation) Sds, 그리고 파동과 해저간의 상호작용(Wave-bottom interaction) Sbot을 모두 고려하여 식 (4)으로 구할 수 있다.
이러한 WW3 모델을 이용하여 사고 당시해역의 파도상태를 재현한 결과는 Fig. 3과 Fig. 4에서 확인할 수 있다. Fig. 3은 사고 당시의 풍속과 파고에 대한 시계열 데이터를 각각 나타내며, Fig. 4는 사고 당시의 파랑 스펙트럼을 나타낸다.

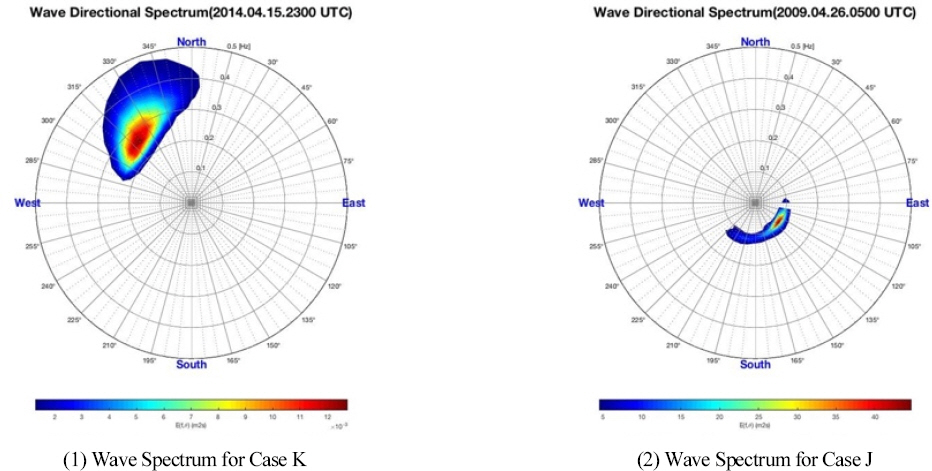
상대적으로 Case K의 경우에는 약 4 m/s의 약한 바람과, 0.5 m의 낮은 파도에 노출되었으며, Case J의 경우에는 약 30 m/s의 강한 바람과, 9 m의 거친 파도에 노출됨을 확인하였다. 이를 통해 Case J는 강한 바람과 높은 파도의 영향을 받아 강한 선박 모션이 발생할 것으로 예상된다. 특히 파도 방향이 선박의 횡방향으로 받아 강한 선체 횡동요가 발생할 수 있을 것으로 추정할 수 있다. 하지만 Case J와는 다르게 Case K의 경우에는 기상상태가 상대적으로 양호한 것을 알 수 있다. 이에 대한 추가적인 분석이 필요한 것으로 확인된다.
4. 선박 운동 시뮬레이션 모델
본 연구에서는 파도 시뮬레이션을 통한 해상 상태의 재현과 함께, 해당 해상 상태에서 선박 운동이 어떻게 발생할 수 있는지 선박 운동 시뮬레이션을 통해 확인하였다. 여기서 선박 운동 시뮬레이션 모델은 NSM (the new strip method; Fujino and Sakurai, 1982) 모델과 EUT (the enhanced unified theory; Kashiwagi, 1997) 모델, 두가지 시뮬레이션 모델을 이용하였다. 선박 운동의 방향 스펙트럼은 방향성 파랑 스펙트럼(Directional Wave Spectrum)과 주파수 응답함수(Frequency Response Function)를 통해서 아래 식 (5), (6)과 같이 계산할 수 있다. 또한 선박 운동의 유의 진폭은 식 (7), (8)로 계산할 수 있으며, 선박운동의 시계열 데이터는 식 (9), (10)으로 각각 구할 수 있다.
여기서, ER와 EP는 선박 횡운동(Roll), 종운동(Pitch) 방향 스펙트럼을 나타내며, R(f,θ)와 P(f,θ)는 주파수 응답 함수, R1/3와 P1/3는 선박 횡, 종 운동의 유의 진폭값, 그리고 RSHIP(t)와 PSHIP(t)는 선박 횡, 종 운동의 시계열 분석값을 나타낸다. 또한, εR과εP는 선박 횡, 종 운동의 위상, ε는 입사파의 위상을 각각 의미한다.
해당 선박 운동 시뮬레이션은 파도 스펙트럼을 이용하여 상대선속, 방위 등을 고려하여 선박 종, 횡동요 운동을 예측할 수 있다. 선박 운동 시뮬레이션 프로그램인 EUT와 NSM을 이용하여, 선박 Pitch, Roll 운동의 시계열 변화를 추정한 결과는 Fig. 5와 같다.
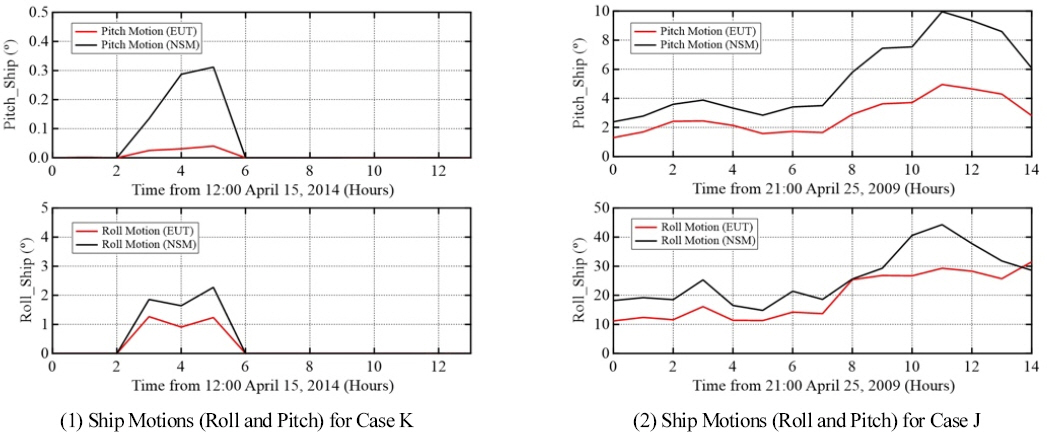
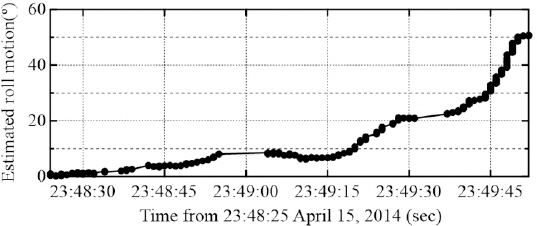
파도 시뮬레이션 모델과 선박 운동 시뮬레이션 모델을 이용하여 선박운동을 추정한 결과, Case J에서 선박 횡동요 운동이 NSM모델의 결과 약 40 도, EUT모델의 결과로는 약 30 도 발생하여 사고 위험성이 매우 높을 것으로 예상된다. Waskito et al. (2022) 는 여러 선박모델을 비교 평가한 결과, NSM 선박 모델은 다른 선박모델에 비해 과도하게 선체운동을 평가하는 경향(Overestimate)을 보이는 것을 확인하였다. 본 연구에서의 결과도 마찬가지로 NSM 선박 모델은 과도하게 계산되었기 때문에, EUT 모델의 결과를 이용하는 것이 합리적이다. Case K에서는 상대적으로 적은 선박 운동이 발생함을 알 수 있다. 이 경우, 악천후로 인한 영향이 아닌, 다른 이유로 선박 운동이 강하게 발생한 것으로 추정할 수 있다. Park et al. (2015) 는 Case K의 해당 사고 지점에서의 조류 특성을 조사하였다. 그 결과, 사고 지점에서의 지형적인 영향으로 강한 유속이 나타나, 효과적인 수색작업 등이 어려웠음을 보여주었다. 따라서 본 연구에서는 파도 시뮬레이션을 통한 선박 운동 추정값이 아닌 관련 사고보고서를 참조하여(SIC, 2022) 사고 당시의 횡경사 추정 그래프를 이용하여 트레일러 가속도를 추정하고자 한다. Case K의 사고 당시 횡경사 변화 추정 그래프는 Fig. 6과 같다. 사고 당시에 상당한 선박의 횡경사(약 50 도)가 발생하였음을 추정할 수 있으며, 과도한 트레일러 운동 및 가속도로 인한 화물 고박 안전성의 상실이 선박 복원성의 손실로 이어졌음을 예상할 수 있다.
5. 트레일러 운동 모델
이 장에서는 선박 운동에 따른 트레일러 모션을 추정하고자 한다. 트레일러 가속도은 선박의 종, 횡 운동에 의해 발생되는 외력에 의해 발생한다고 가정하였으며, 선박 운동에 의한 트레일러의 운동 모델은 Fig. 7과 같이 구축하였다.
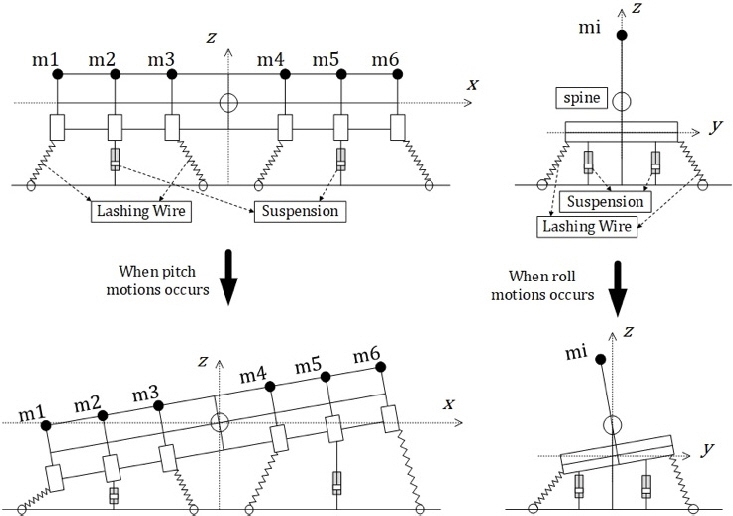
연안 페리선박에 적재된 트레일러는 와이어(Lashing wire)로 고박 되고, 타이어와 완충재(Suspension)로 선체바닥과 연결되어 있다고 가정하였다. 이 트레일러 운동 모델에서는 선박 pitch, roll 운동으로 발생하는 원심력(Centrifugal force), 접선력(Tangential force)을 아래 식과 같이 계산하였다.
여기서, TRy, TRZ는 선박 Roll 운동에 의해 발생하는 y방향, z방향의 접선력, TPx, TPz는 선박 Pitch 운동에 의해 발생하는 x방향, z방향의 접선력을 각각 의미한다. 또한 CRy, CRZ 는 선박 Roll 운동에 의해 발생하는 y방향, z방향의 원심력, CPx, CPz는 선박 Pitch 운동에 의해 발생하는 x방향, z방향의 원심력을 각각 의미한다. m은 트레일러의 무게, β와δ는 각각 y-z 평면과 x-z 평면에서 선박 중심과 트레일러 중심 사이의 각도, r1와r2는 각각 y-z 평면, x-z v평면에서 선박 중심과 트레일러 중심사이의 거리를 의미한다. 트레일러의 적재 위치가 선체 중심에서 멀어질수록, r1와r2가 커지게 되어 작용하는 외력이 커지게 되기 때문에, 선체 외곽에 위치할수록 고박 안전에 더욱 주의해야 한다. 예를 들어, 선체 중심에 적재된 화물보다 선체의 외곽에 적재된 화물은 원심력 등이 크게 발생하게 되어 더 큰 외력, 즉 가속도가 크게 발생할 것으로 예상된다.
이렇게 본 연구에서는 선박 운동으로 인해 발생하는 외력이 트레일러에 작용하게 되고, 그로 인한 가속도를 예측하고자 하였다. 트레일러의 고박 안전성은 와이어의 고박력이, 외력의 합보다 클 경우에 해당 트레일러의 고박이 안전한 것으로 판정할 수 있다. 트레일러에 작용하는 외력의 총합을 통해 가속도를 예측할 수 있으며, 종, 횡, 수직 방향 (x, y, z 축)으로 가속도를 구별하여 평가한다. Fig. 8은 IMO CSS 상에서 제시하는 기본가속도 값으로 화물의 위치에 따라 각각 다른 가속도 적용값을 제시하고 있음을 알 수 있다.
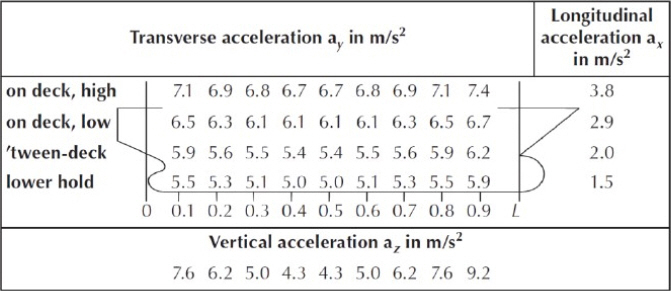
Fig. 8의 가속도 기본 설정값은 선박 길이 100 m, 서비스 속도 15 knots, 그리고 B/GM값이(선폭/메타센터 높이) 13 이상인 선박을 기준으로 제시되었다. 그 외의 선박은 식 (19)에 따라 수정계수를 계산하여 가감한다.
여기서, V는 선박속도(knots), L은 선박 길이(m)를 의미하며, 이 수식은 선박길이 50 m 이하 혹은 300 m 이상의 선형에는 적합하지 않다. 이 공식을 이용하여 Case K의 수정계수는 1.0271, Case J의 수정계수는 0.9056로 구할 수 있으며, 이 수정계수를 감안한 x, y, z축 방향의 기준 가속도는 Case K의 경우, 각각 3.9 m/s2 (x축), 7.6 m/s2 (y축), 9.5 m/s2 (z축)이며, Case J의 경우에는, 3.4 m/s2 (x축), 6.7 m/s2 (y축), 8.3 m/s2 (z축)이다.
본 연구에서는 가장 위험할 것으로 예상되는 트레일러 선적 위치인, 선체의 가장 외곽에 위치한 트레일러의 가속도를 계산하여 이를 IMO CSS의 기준값과 비교하여 평가하였다. Case K와 Case J의 경우에 발생하게 되는 트레일러 운동을 x, y, z 축으로 구분하여 가속도를 계산 결과는 아래 Fig. 9과 같다.
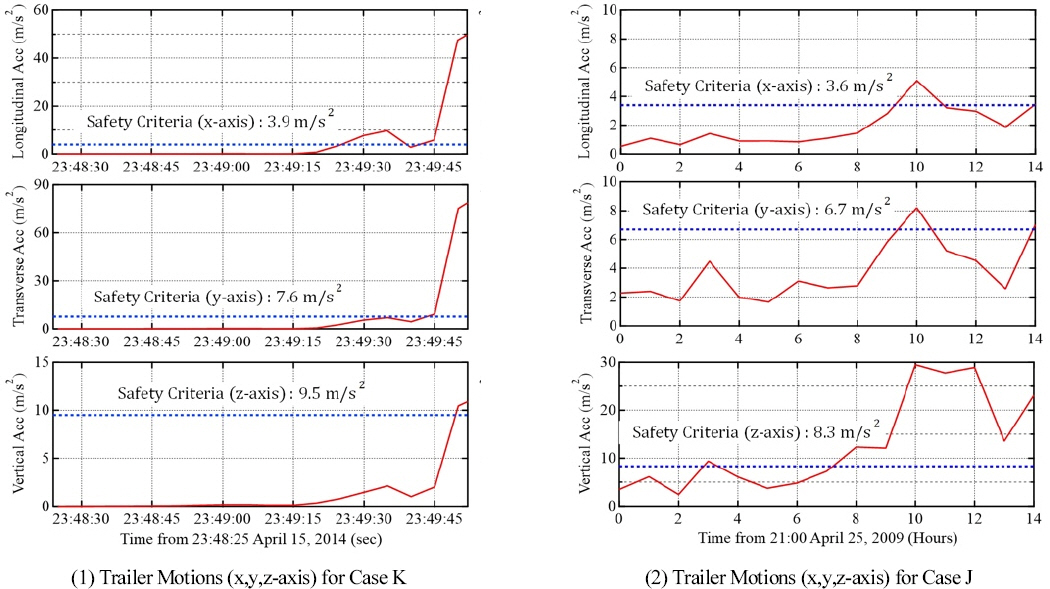
Fig. 9에서 보이는 바와 같이, 각 x, y, z축(종, 횡, 수직 방향)에 기준 가속도 값은 파란색 점선으로 표시하여, 이를 임계값으로 설정하고, 이를 초과하게 되면 고박 안전성이 확보되지 않는 것으로 판정하였다. Case K의 경우, 종방향의 가속도가 약 23시 49분 20초, 횡방향의 가속도는 약 23시 49분 32초, 수직방향의 가속도는 약 23시 49분 47초에 각각 기준 가속도를 초과한 것을 확인하였다. 따라서 가속도 값을 기준으로 고박 안전성을 평가할 경우, 약 23시49분20초가 첫번째 위험성을 보였다고 평가할 수 있다. 이와 마찬가지로 Case J에서 기준 가속도 값을 초과한 시기는 종방향과 횡방향 가속도는 모두 약 9시간 후, 수직방향 가속도는 약 3시간 후로 평가할 수 있다. 따라서 Case J의 경우에는 약 3시간 후인 26일 00시부터 고박 안전성이 확보되지 않을 수 있음을 나타낸다. 이 두가지 케이스 스터디에서 가속도를 기준으로 평가한 결과, Case K의 위험이 시작되는 시간은 23:49:20, Case J는 26일 00시로 확인하였다. 그 시점, 즉 고박 안전성이 확보되지 않는다고 평가할 수 있는 시점에서의 유의파고 높이, 선박 운동 값, 트레일러 가속도 값은 다음 Table 4과 같이 정리할 수 있다.
Table 4
Estimated results of standard values for safety of cargo securing
| Case K (23:49:20) | Case J (04/26 00:00) | |
|---|---|---|
| Significant Wave Height | 0.4 m | 5.0 m |
| Ship motions (Roll) | 15 deg | 15 deg |
| Trailer acceleration (x, y, z-axis) | 3.9 m/s2(x-axis) | 8.3 m/s2(z-axis) |
위에서 정리한 결과를 통해, 연안 페리선박의 운영시에 고박 안전성이 확보되지 않는 시점의 파고, 선박 운동, 그리고 화물 가속도를 평가할 수 있었다. Case K의 경우, 유의파고가 0.4 m로 잔잔한 것으로 보아, 파고의 영향보다는 다른 이유로 인해 사고로 이어졌을 가능성이 높은 것으로 보여진다. 하지만 Case J의 경우에는, 5.0 m의 매우 거친 파도로 인한 선체 운동과 화물 가속도로 인해 화물 고박이 파손되는 등의 사고로 이어졌을 것으로 예상할 수 있다. 따라서, Case J에서의 결과인 유의파고 5.0 m와 선박 횡동요(Rolling) 15 도를 연안 페리선박의 안전기준으로 추가적으로 이용할 수 있을 것이다. 본 연구에서는 새로운 안전기준을 적용하여 연안 페리선박의 사고 위험성을 평가하는 알고리즘을 Fig. 10과 같이 제안하고자 한다.
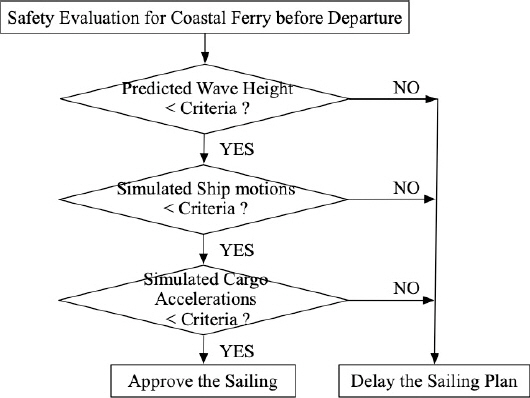
본 연구에서 새롭게 제안하는 연안 페리선박의 안전성 평가 기준은 기존 화물 가속도의 평가만이 아닌 기상예보를 통한 파도 높이 및 선박 운동을 추가적으로 평가한다. 이는 연안 페리선박의 운항사고를 예방하는 것 뿐만 아니라 보다 합리적인 평가 기준을 제시하는 데에 그 의의가 있다. 하지만 본 연구에서는 단일 화물인 트레일러로 특정지어 연구를 진행하였기 때문에, 추후 연구에서는 다양한 선종, 적재화물, 적재위치 등 여러 상황을 고려하여야 할 것이다.
현재 내항선 화물 적재 및 고박에 대한 기준은 선박 운항의 현실에 적합하게 개선될 필요가 있으며, 안전사고 예방을 위해서는 명확히 고박 안전 기준을 준수 할 필요가 있다(Jeon and Lee, 2019). 본 연구에서는 연안 페리선박의 고박 안전성을 평가함에 있어, 파도 시뮬레이션 모델, 선박 모델, 트레일러 모델 등을 이용하여, 페리 선박의 고박 안전성을 평가하는 기준을 제시하고자 하였다. 이는 기존에 사용중인 화물의 가속도 뿐만 아니라 유의파고, 선박 운동 등이 포함되었다. 이러한 고박 안전성의 평가기준은 실제 운항에서 평가하기 어려운 가속도 값이 아닌, 기상예보를 통한 예측파고와 선박 운동 예측치를 출항 전 사고위험성을 줄이기 위한 기초 운항 자료로 활용될 것으로 기대된다.
6. 결 론
국내의 연안 페리선박은 원양항해 선박과 다르게 대부분 국내 연안을 1일 이내로 항해하는 특수성이 있다. 단기간의 연안 항해의 경우에도, 기상예보 등을 통한 선박의 안전운항이 보장되어야 한다. 특히 화물 고박 안전성은 선박 복원력 상실로 이어지는 대형사고를 발생시킬 수 있기 때문에 철저하게 관리되어야 한다. 하지만 국내의 화물적재고박 등에 관한 기준은 IMO 고박 지침을 거의 그대로 수용하여 현실적으로 불합리한 것으로 보여진다.
따라서 본 연구에서는 한국과 일본에서 발생한 연안 페리선박의 사고를 고박 안전성 측면에서 분석하였다. 페리 선박에 적재되는 화물 중 그 규모와 무게로 인해 가장 위험할 것으로 예상되는 트레일러 화물을 선택하였다. 우선 파도 시뮬레이션 모델을 통해 사고 당시의 해상상태를 재현하였으며, 파도 시뮬레이션 결과인 파도 스펙트럼 값을 선박 운동 모델에 입력하였다. 또한 선박 운동 모델을 통해 계산된 선박 종, 횡동요 운동(Pitch, Roll motions)으로 발생할 수 있는 트레일러의 가속도를 종, 횡, 수직 방향으로 각각 계산하였다. 계산된 가속도를 IMO CSS 기준과 비교하여 화물 가속도 관점에서의 사고 시점을 예측하고, 그 사고 시점에서의 유의파고, 선박 횡동요 값을 추가로 제시하였다. 하지만 본 연구에서는 두가지 사고만을 대상으로 분석하였기 때문에, 다양한 기상조건과 선박을 대상으로 추가적인 분석, 그리고 실측 데이터를 통한 비교 평가를 통해 보다 합리적인 연안 페리선박의 고박 안전 기준을 제시할 필요가 있다. 이러한 수치해석기법과 실측실험 등을 추가적으로 실시한다면, 연안 페리선박에 대한 안전 기준을 개정할 수 있음은 물론이고 사고 예방에 크게 기여할 수 있을 것으로 기대된다.
 PDF Links
PDF Links PubReader
PubReader ePub Link
ePub Link Full text via DOI
Full text via DOI Download Citation
Download Citation Print
Print






